A Footstep Planning Method for Biped Robots Based on Variable-Parameter Velocity Mapping and Quadratic Programming
March 14, 2023· ,,,,,·
1 min read
,,,,,·
1 min read
Qiang Huang
Junhang Lai
Xuechao Chen
Zhangguo Yu
Qingqing Li
Qing Shi
Yan Huang
Abstract
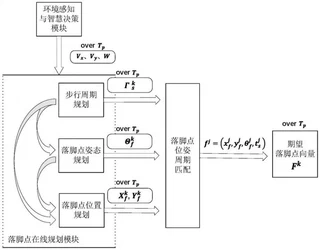
This authorized invention patent concerns a footstep planning method for biped robots based on variable-parameter velocity mapping and quadratic programming.
Type
Publication
Chinese Invention Patent
Patent record
| Field | Official record |
|---|---|
| Chinese title | 基于变参数速度映射和二次规划的双足机器人落脚点规划方法 |
| Patent number | ZL 2022 1 0173869.0 |
| Application date | 24 February 2022 |
| Grant date | 14 March 2023 |
| Grant announcement | CN 114527663 B |
| Certificate number | 5781760 |
| Patentee | Beijing Institute of Technology |
Official inventors: 黄强、赖俊杭、陈学超、余张国、李庆庆、石青、黄岩。

Authors
Junhang Lai
(he/him)
Ph.D. Candidate in Robotics
Junhang Lai is a Ph.D. candidate at the Institute of Intelligent Robotics, Beijing Institute of Technology. His work focuses on humanoid and legged robot locomotion, motion planning and control, reinforcement learning, simulation-to-real deployment, and embodied intelligence systems.