A Linear Characterization Method for the Feasible Motion Range of a Three-DoF Electrically Driven Coupled Robot Joint
May 28, 2024· ,,,,,·
1 min read
,,,,,·
1 min read
Qiang Huang
Junhang Lai
Xuechao Chen
Zhangguo Yu
Junyao Gao
Qingqing Li
Chao Li
Abstract
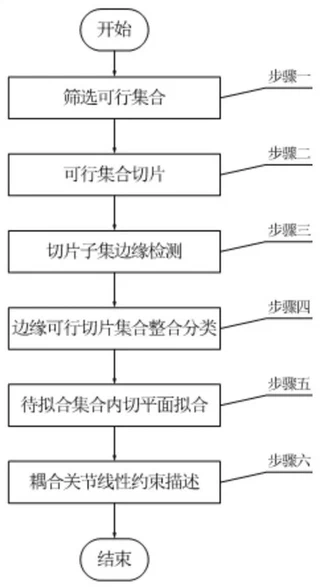
This authorized invention patent concerns a linear method for characterizing the feasible motion range of a three-degree-of-freedom electrically driven coupled robot joint.
Type
Publication
Chinese Invention Patent
Patent record
| Field | Official record |
|---|---|
| Chinese title | 机器人三自由度电驱动耦合关节的运动可行范围线性界定方法 |
| Patent number | ZL 2022 1 1034563.3 |
| Application date | 26 August 2022 |
| Grant date | 28 May 2024 |
| Grant announcement | CN 115256400 B |
| Certificate number | 7031385 |
| Patentee | Beijing Institute of Technology |
Official inventors: 黄强、赖俊杭、陈学超、余张国、高峻峣、李庆庆、李超。

Authors
Junhang Lai
(he/him)
Ph.D. Candidate in Robotics
Junhang Lai is a Ph.D. candidate at the Institute of Intelligent Robotics, Beijing Institute of Technology. His work focuses on humanoid and legged robot locomotion, motion planning and control, reinforcement learning, simulation-to-real deployment, and embodied intelligence systems.