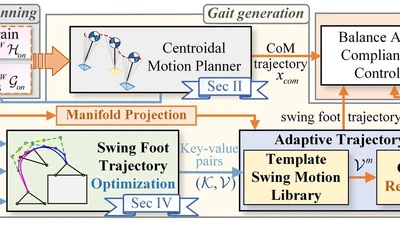
Online Terrain-Aware Bipedal Gait Generation via Manifold Projection and Optimization-Guided Motion Libraries
First-author journal manuscript under second review on terrain-aware bipedal gait generation for mixed terrain.
First-author journal manuscript under second review on terrain-aware bipedal gait generation for mixed terrain.
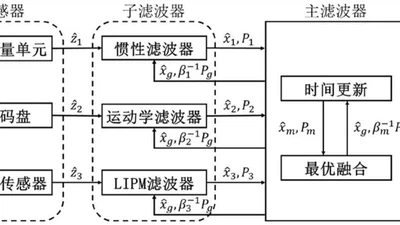
Authorized Chinese invention patent on center-of-mass state estimation for biped robot walking using federated Kalman filtering.
Student third-author SCI journal paper on hybrid environment representation for bipedal look-and-step behavior.
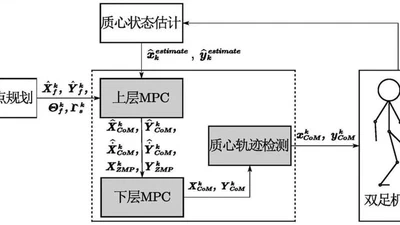
Authorized Chinese invention patent on omnidirectional center-of-mass trajectory planning for biped robots using bilevel model predictive control.
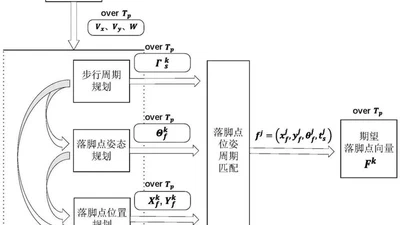
Authorized Chinese invention patent on biped-robot footstep planning using variable-parameter velocity mapping and quadratic programming.
Low-posture crawling, slope climbing, omnidirectional biped walking, and dynamic obstacle avoidance for a primate-inspired mobile robot.