AStarFootstepPlanner
C++ A* footstep planner for humanoid robots on complex terrain with kinematic constraints.
•
1 min read
C++ A* footstep planner for humanoid robots on complex terrain with kinematic constraints.
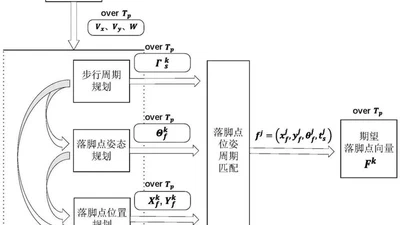
Authorized Chinese invention patent on biped-robot footstep planning using variable-parameter velocity mapping and quadratic programming.