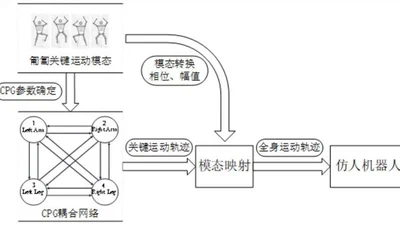
A Whole-Body Motion Planning Method for Low-Posture Crawling of Humanoid Robots Based on Key Mode Decomposition and CPG
Authorized Chinese invention patent on low-posture humanoid crawling based on key mode decomposition and central pattern generators.
qiang-huang