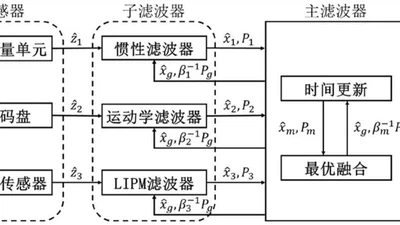
A Center-of-Mass State Estimation Method for Biped Robot Walking Based on Federated Kalman Filtering
Authorized Chinese invention patent on center-of-mass state estimation for biped robot walking using federated Kalman filtering.
qiang-huang
Authorized Chinese invention patent on center-of-mass state estimation for biped robot walking using federated Kalman filtering.
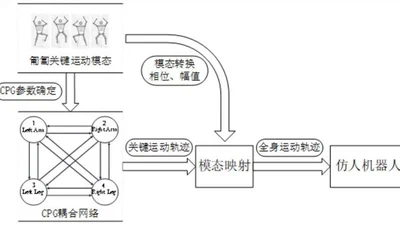
Authorized Chinese invention patent on low-posture humanoid crawling based on key mode decomposition and central pattern generators.
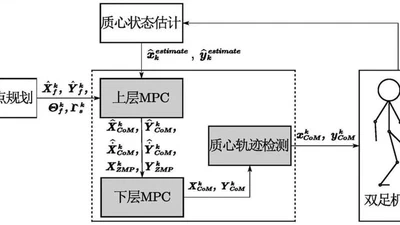
Authorized Chinese invention patent on omnidirectional center-of-mass trajectory planning for biped robots using bilevel model predictive control.
Authorized Chinese invention patent on linear characterization of the feasible motion range of a three-DoF electrically driven coupled robot joint.
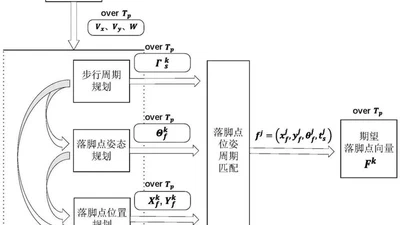
Authorized Chinese invention patent on biped-robot footstep planning using variable-parameter velocity mapping and quadratic programming.