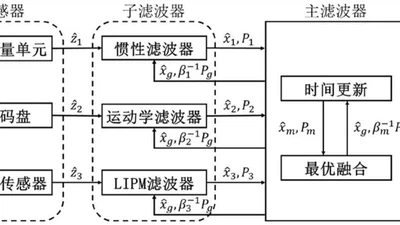
A Center-of-Mass State Estimation Method for Biped Robot Walking Based on Federated Kalman Filtering
Authorized Chinese invention patent on center-of-mass state estimation for biped robot walking using federated Kalman filtering.
qiang-huang
Authorized Chinese invention patent on center-of-mass state estimation for biped robot walking using federated Kalman filtering.