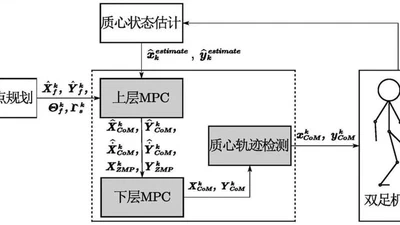
An Omnidirectional Center-of-Mass Trajectory Planning Method for Biped Robots Based on Bilevel Model Predictive Control
Authorized Chinese invention patent on omnidirectional center-of-mass trajectory planning for biped robots using bilevel model predictive control.
qiang-huang